Robots and other autonomous systems are increasingly being adopted in diverse fields – from health care and security to transport and manufacturing – as they become cheaper and smarter.
However, a significant gap exists between the current reality of robotic capabilities and real-world requirements. Through the MBZIRC Maritime Grand Challenge, we at ASPIRE are looking to bridge the gap by pushing technological boundaries and enabling robots to work more autonomously in dynamic, unstructured environments, while interacting and collaborating with us – and with one another.
To be held in 2024, the competition will bring together universities, research institutions and individual innovators from all over the world to collaborate on finding a practical solution to global maritime security challenges such as illegal fishing, piracy, smuggling and human trafficking.
It is the first experiment of its kind that will involve a heterogeneous collaboration among unmanned aerial vehicles and unmanned surface vehicles to perform complex navigation and manipulation tasks in a GNSS- denied marine environment.
The competition offers a prize money of US $3,250,000
The team winning the first prize will take home US $2,000,000.
The team placed second will receive US $500,000
The team bagging the third prize wins US $250,000.
A special cash award of US $500,000 will also be awarded to all teams progressing to the demonstration phase. The amount is to be split among the teams.
Teams that accept the demonstration phase prize money will provide to ASPIRE nonexclusive, perpetual and royalty-free access to the IP, with rights to sublicence it to third parties.
Now till February 2024, the MBZIRC Maritime Grand Challenge will stretch the collective intelligence and creativity of teams from universities, research institutions, and innovative businesses the world over. The journey to the final in Abu Dhabi will challenge robotics pioneers to collaborate, innovate, and generate new technical solutions that meet the demands of the modern world.
01 Oct, 2021 - 31 Jan, 2022
White paper submission deadline has now passed.
Semi-finalists will be announced in March 2022.
Oct 2022
Shortlisted semi finalist teams will complete inspection and intervention tasks via simulation in the presence of a judging committee. Proof-of-concept videos on different subcomponents of their system need to be submitted to demonstrate the feasibility of the approach used.
The demonstration should cover the following elements of the challenge:
- Multi-UAV search and inspection of large representative structures;
- Intra-swarm communication and collective decision-making; and
- Collective lift and transport of larger objects to a home location.
Feb 2024
The final live demonstration will be held over several days in February 2024 in a specially designated maritime area off the coast of Abu Dhabi, when five finalist teams will put their systems to the test.
Judging will be against the clock, with total time to complete the Inspection and Intervention tasks (plus penalties) determining the winner. There will be a maximum qualification time: failure to complete the tasks within that time will not be considered successful. If conditions allow, teams will be given multiple opportunities to complete the tasks.
*Please note that is an initial timeline, which maybe subject to change. Any changes to the timeline will be announced on the website.

Qualified White Paper submissions as per white paper submission requirement
Team
Qualified Teams
Team name | Country | Collaborating Entities |
|---|---|---|
ABHIYANTA | India | Sagar Defence Engineering Pvt. Ltd, India |
Acanthus | India | Bullayya College of Engineering Visakhapatnam, India |
Aero Tech Logistics | Bangladesh | United International University, Bangladesh |
AeroMIT | India | Manipal University, India |
AIRBORNE ROBOTICS | United Kingdom | AIRBORNE ROBOTICS, United Kingdom |
Amphibees Team | Turkey | Istanbul Technical University, Turkey |
Argo's Crew | Belgium | RMA - Belgian Royal Military Academy, Belgium |
BUAA Seafowl RoboticsTeam | China | Beihang University, China |
Cooperative Mission Control (CMC) - Ryerson University and University of Bath | Canada | Ryerson University, Canada |
Cosmobotics | India | Cosmobotics, India |
C-PARROT | USA | Lockheed Martin Advanced Technology Labs, USA |
Critical HIT | China | Harbin Institute of Technology, China |
Dubai Police Youth | UAE | Dubai Police, UAE |
Fly Eagle | China | Beijing Institute of Technology, China |
Flying Tigers | UAE | Rochester Institute of Technology, Dubai, UAE |
GATA | Turkey | GATA, Turkey |
GGM | Republic of Korea | GGM Team, Republic of Korea |
HiPeRT | Italy | HiPert Srl, Italy |
KAU Team | Saudi Arabia | King Abdulaziz University (KAU), Saudi Arabia |
KU Leuven – Group T | Belgium | KU Leuven university, Belgium |
Land Ocean International Automation Technology And Development Co., Ltd. | China | Land Ocean International Automation Technology And Development Co., Ltd., China |
MBZUAI Team | UAE | Mohamed bin Zayed University of Artificial Intelligence, UAE |
National University of Technology (NUTECH) | Pakistan | NUTECH - National University of Technology, Pakistan |
Naval Swarms X | France | Naval Group, France |
New Dexterity / CARES - Talos Team | New Zealand | University of Auckland, New Zealand |
NTU-ARIS | Singapore | Nanyang Technological University, Singapore |
PredatorX | India | Great Eagle Tech, India |
R.U.G.V.E.D. Systems | India | Manipal Academy of Higher Education, India |
RAMPART (Robotic Autonomous Maritime Protection And Retrieval Technologies) | USA | Autonomous Flight Technologies, Inc., USA |
ROC | Denmark | Technical University of Denmark, Denmark |
Seagulls of Dune | Ukraine | ELEKS, Ukraine |
SKALP Robotics Association | Poland | Robotics Association SKALP, Poland |
Sky-Eye | Spain | Universidad Politécnica de Madrid, Spain |
Slozhno | Russia | Saint-Petersburg State University, Russia |
SRB Aerial Systems | Saudi Arabia | SRB Aerial Systems, Saudi Arabia |
Team ANKA | Turkey | Team Anka, Turkey |
Team ArRow | UAE | New York University, Abu Dhabi, UAE |
TEAM CLARENDRON | India | Team Clarendron, India |
Team Garuda | India | Indian Institute of Science (IISc), India |
Team KAIST | Republic of Korea | Korea Advanced Institute of Science and Technology (KAIST), Republic of Korea |
Team Luna | India | Indian Institute of Science Education and Research, India |
Team SARIYA | Portugal | Drone Drop, Portugal |
Team Spearhead | USA | New York University - Tandon School of Engineering, USA |
TESTUDO | USA | University of Maryland, USA |
University of Electronic Science and Technology of China | China | University of Electronic Science and Technology of China, China |
UNIZG-FER team | Croatia | University of Zagreb, Croatia |
Unmanned Aerial Systems - Delhi Technological University (UAS-DTU) | India | Delhi Technological University, India |
UNSW Competitive Robotics Group (UCRG) | Australia | University of New South Wales, Australia |
Versa UAS | UAE | Versa Aerospace LLC, UAE |
VETRI | India | Virginia Tech India Research and Education Forum, India |
Warsaw MIMotaurs | Poland | University of Warsaw, Poland |
ZJU-HI | China | Zhejiang University (ZJU), China |







The open source MBZIRC Maritime Grand Challenge simulator is provided by Open Robotics, the global leader in software for robotics simulation and application development.
MBZIRC Maritime Grand Challenge Simulator is available at:
GitHub - osrf/mbzirc: Simulator for the MBZIRC Maritime Grand Challenge
The simulation platform for the MBZIRC Maritime Grand Challenge will be built on Ignition and Robot Operating System (ROS).
Ignition Gazebo is an open-source 3D robotics simulator. It accurately and efficiently simulates robots for a wide range of applications, including maritime robotics. It has a robust physics engine, advanced 3D graphics, and programmatic interfaces, including integration with ROS. Ignition also offers an online 3D model repository, Ignition Fuel, that offers various robot and environment 3D assets readily available for simulation.
ROS is an open source software development kit that helps to build robot applications It offers a standard software platform to developers across industries that will carry them from research and prototyping all the way through to deployment and production. Ignition integrates well with ROS, which means that software developed using ROS for simulation in Ignition can easily be ported to work on real hardware, facilitating a smooth transition from simulation to reality.
The simulation environment created for the MBZIRC Maritime Grand Challenge will consist of a large coastal region, UAVs with different sensor configurations, a USV model, a robot manipulator, and multiple target vessels. A set of ROS2 APIs will be exposed for controlling robots and reading data from sensors in simulation. Inter-robot communication will be provided through a separate set of APIs, and the communication links are subject to package loss and interferences that are common in outdoor wireless communication.
The MBZIRC simulation platform will run on Ubuntu 20.04 (Focal). Users can install the software from source for local testing and development. In addition, Docker images of the simulation setup will also be made available.
The simulator uses historical weather data provided by meteoblue to simulate realistic weather conditions.
The open source MBZIRC Maritime Grand Challenge simulator is provided by Open Robotics, the global leader in software for robotics simulation and application development.
MBZIRC Maritime Grand Challenge Simulator is available at:
GitHub - osrf/mbzirc: Simulator for the MBZIRC Maritime Grand Challenge
The simulation platform for the MBZIRC Maritime Grand Challenge will be built on Ignition and Robot Operating System (ROS).
Ignition Gazebo is an open-source 3D robotics simulator. It accurately and efficiently simulates robots for a wide range of applications, including maritime robotics. It has a robust physics engine, advanced 3D graphics, and programmatic interfaces, including integration with ROS. Ignition also offers an online 3D model repository, Ignition Fuel, that offers various robot and environment 3D assets readily available for simulation.
ROS is an open source software development kit that helps to build robot applications It offers a standard software platform to developers across industries that will carry them from research and prototyping all the way through to deployment and production. Ignition integrates well with ROS, which means that software developed using ROS for simulation in Ignition can easily be ported to work on real hardware, facilitating a smooth transition from simulation to reality.
The simulation environment created for the MBZIRC Maritime Grand Challenge will consist of a large coastal region, UAVs with different sensor configurations, a USV model, a robot manipulator, and multiple target vessels. A set of ROS2 APIs will be exposed for controlling robots and reading data from sensors in simulation. Inter-robot communication will be provided through a separate set of APIs, and the communication links are subject to package loss and interferences that are common in outdoor wireless communication.
The MBZIRC simulation platform will run on Ubuntu 20.04 (Focal). Users can install the software from source for local testing and development. In addition, Docker images of the simulation setup will also be made available.
The simulator uses historical weather data provided by meteoblue to simulate realistic weather conditions.
Team name | Country | Collaborating Entities |
|---|---|---|
AIRBORNE ROBOTICS |  United Kingdom | AIRBORNE ROBOTICS |
Fly Eagle |  China | Beijing Institute of Technology, China |
HiPeRT |  Italy | HiPert Srl |
ROC |  Denmark | Technical University of Denmark, Denmark |
Sky-Eye |  Spain | Universidad Politécnica de Madrid |
Team KAIST |  Republic of Korea | Korea Advanced Institute of Science and Technology (KAIST) |
UNIZG-FER team |  Croatia | University of Zagreb, Faculty of Electrical Engineering and Computing (FER) |
UNSW Competitive Robotics Group (UCRG) | -flag.png) Australia | University of New South Wales |
Warsaw MIMotaurs |  Poland | University of Warsaw |
Argo's Crew (Withdrawn) |  Belgium | Royal Military Academy |
MBZUAI Team (Withdrawn) |  UAE | Mohamed bin Zayed University of Artificial Intelligence, UAE |
SKALP Robotics Association (Withdrawn) |  Poland | Robotics Association SKALP |
Team Luna (Withdrawn) |  India | Indian Institute of Science Education and Research (IISER Bhopal) |
ZJU-HI (Withdrawn) |  China | Huzhou Institute of Zhejihang University |





Finalist Teams
 Fly Eagle
Fly Eagle
The Team Fly Eagle includes members from Beijing Institute of Technology (BIT) and Khalifa University (KU).Read More ...
 China
China UAETeamline
UAETeamline

- ROC

We are a team of two Scandinavian universities, Danmark Tekniske Universitet (DTU) and Luleå tekniska universitet (LTU), both very active in the scientific fields of Robotics and Autonomous Systems. Read More ...
 Denmark
Denmark Sweden
Sweden - Team KAIST

Team KAIST consists of four university labs and two start-up companies at Daejeon, Republic of Korea. The four university labs are MORIN(KAIST), USRG(KAIST), VILab(KAIST), and IAM(Cheongju University). Read More ...
 Republic of KoreaTeamline
Republic of KoreaTeamline
- UNIZG-FER

UNIZG-FER is a team of the University of Zagreb, Faculty of Electrical Engineering and Computing. The team consists of two laboratories - LARICS (Laboratory for Robotics and Intelligent Control Systems) and LABUST (Laboratory for Underwater Systems and Technologies).Read More ...
 CroatiaTeamline
CroatiaTeamline
- Warsaw MIMotaurs

The Nomagic Warsaw MIMotaurs team is a group of talented individuals from academia and business who are working together to solve challenging problems in the field of robotics. Read More ...
 PolandTeamline
PolandTeamline
Finalist Teams
- Fly Eagle
The Team Fly Eagle includes members from Beijing Institute of Technology (BIT) and Khalifa University (KU).Read More ...
ChinaUAETeamline - ROC
We are a team of two Scandinavian universities, Danmark Tekniske Universitet (DTU) and Luleå tekniska universitet (LTU), both very active in the scientific fields of Robotics and Autonomous Systems. Read More ...
DenmarkSweden - Team KAIST
Team KAIST consists of four university labs and two start-up companies at Daejeon, Republic of Korea. The four university labs are MORIN(KAIST), USRG(KAIST), VILab(KAIST), and IAM(Cheongju University). Read More ...
Republic of KoreaTeamline - UNIZG-FER
UNIZG-FER is a team of the University of Zagreb, Faculty of Electrical Engineering and Computing. The team consists of two laboratories - LARICS (Laboratory for Robotics and Intelligent Control Systems) and LABUST (Laboratory for Underwater Systems and Technologies).Read More ...
CroatiaTeamline - Warsaw MIMotaurs
The Nomagic Warsaw MIMotaurs team is a group of talented individuals from academia and business who are working together to solve challenging problems in the field of robotics. Read More ...
PolandTeamline
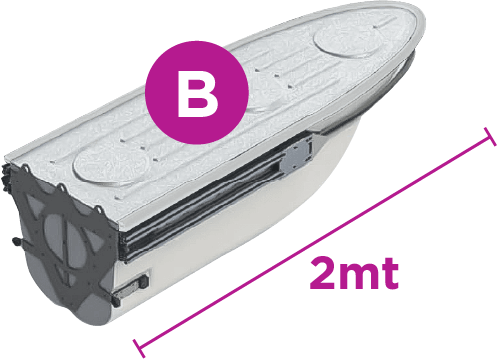
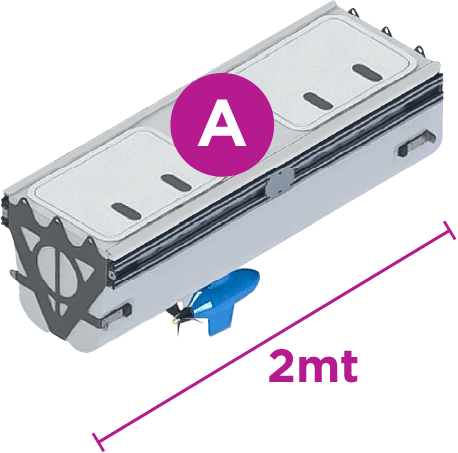
Modularity

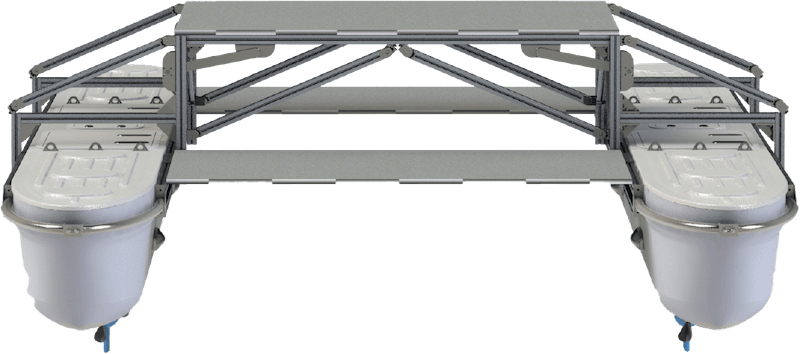
- Each hull made of three 2m-long watertight sections joined together
- Design allows scope to re-use hull sections in different hull configurations (longer...larger)
- Swappable hull sections guarantee ease of maintenance and low downtime
Versatility
- Battery + Solar panel powered propulsion guarantees large operational range
- Electric engines allow for virtually silent and environmentally friendly operations
- Hull sections can be pre-configured and fitted according to different mission requirements
Ease of transport, assembly and deployment
- Hull and upper platform sections are no longer than 2m
- The whole vessel can be conveniently stored and shipped in pieces
- Assembly of the vessel requires basic tools (screwdriver, wrenches, pliers) and no glue/adhesive
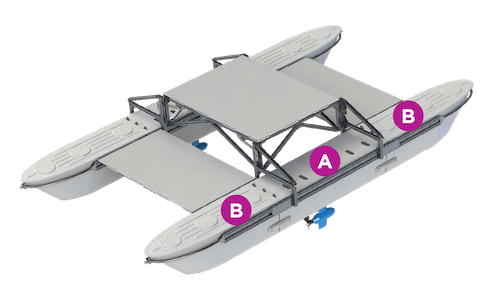
Robust marine design
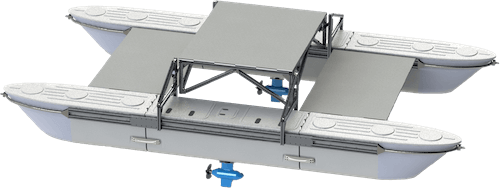
- Two steerable engines,and optionally,four rudders guarantee unmatched manoeuvrability
- Redundancy in case of failure : Each central Hull section is independent. The catamaran can be manoeuvred only with one motor and one rudder.
- Large flat surfaces available for safe transport of mission payload, or Solar panel installation.
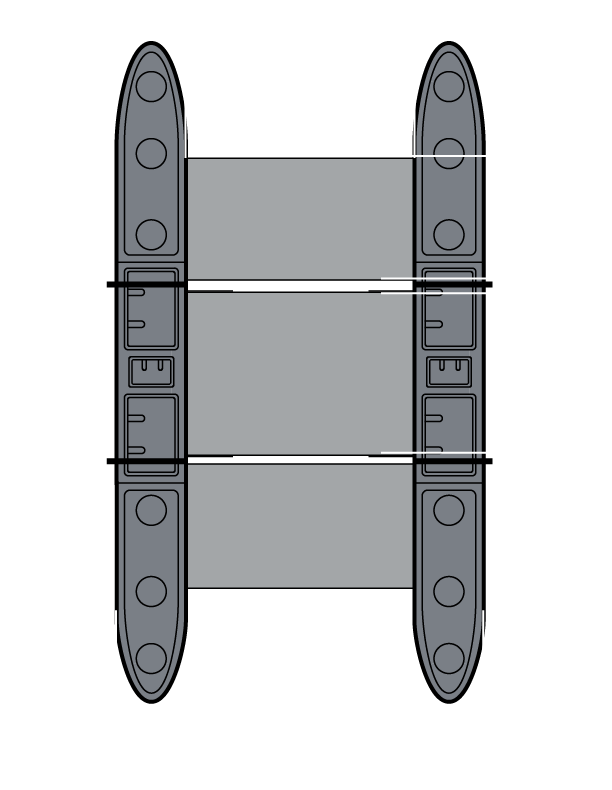
Specification
| Feature | Modular Catamaran |
|---|---|
| Hull construction | Fiberglass |
| No. of hull sections | 3 |
| Length (LOA) | 6 m |
| Total height | 1.4 m |
| Height over waterline | 1 m |
| Draft | 60 cm |
| Width | 300 cm |
| Dry weight | 500 Kg |
| Payload | 600 Kg (overload up to 1000 kg) |
| Cruise speed | 4 knots |
| Max speed | 8 knots |
| No. of engines | 2 |
| Max engine power | 2x4 kW |
| Standard battery pack | 16 cells lifepo4 3.2V 110Ah . 5.6 kWh x 2 (nominal) 4.8 kWh at standard discharge @ 48V |
| Extended Battery pack | 32 cells lifepo4 3.2V 110Ah . 11.2 kWh x 2 (nominal) 9.6 kWh at standard discharge @ 48V |
| Range (battery operated) | 15 Nm 25 Nm (standard Bp) , 30 nm 50 Nm extended Bp |
| Charging time | Standard Charge: 4h Fast Charge: 1h (fast charger optional) |
| Solar panels area | 6 m^2 , max power 1.1 Kw , charging time 8- 16 hours (standard extended battery pack) |
| Range with solar panel <= speed 3kn | Unlimited, battery recharge |
Dimensions in mm
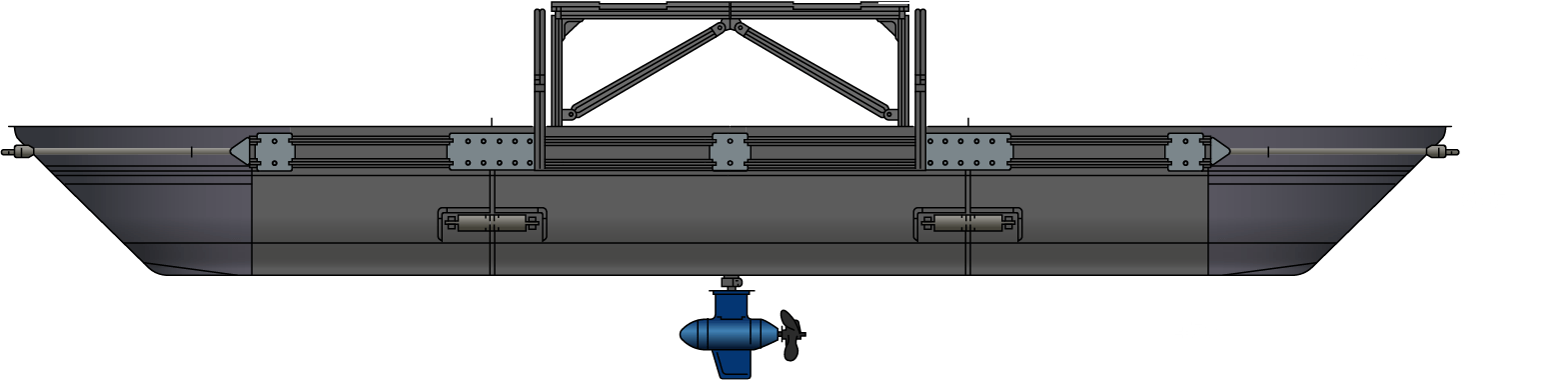
Thrusting Steering

- Rotation angle: +/-90°
- CAN open interface
- Max rotation speed 15°/sec
- Auto zero
- Encoder resolution 0.1 deg
Modularity
- Each hull made of three 2m-long watertight sections joined together
- Design allows scope to re-use hull sections in different hull configurations (longer...larger)
- Swappable hull sections guarantee ease of maintenance and low downtime
Versatility
- Battery + Solar panel powered propulsion guarantees large operational range
- Electric engines allow for virtually silent and environmentally friendly operations
- Hull sections can be pre-configured and fitted according to different mission requirements
Ease of transport, assembly and deployment
- Hull and upper platform sections are no longer than 2m
- The whole vessel can be conveniently stored and shipped in pieces
- Assembly of the vessel requires basic tools (screwdriver, wrenches, pliers) and no glue/adhesive
Robust marine design
- Two steerable engines,and optionally,four rudders guarantee unmatched manoeuvrability
- Redundancy in case of failure : Each central Hull section is independent. The catamaran can be manoeuvred only with one motor and one rudder.
- Large flat surfaces available for safe transport of mission payload, or Solar panel installation.
Specification
| Feature | Modular Catamaran |
|---|---|
| Hull construction | Fiberglass |
| No. of hull sections | 3 |
| Length (LOA) | 6 m |
| Total height | 1.4 m |
| Height over waterline | 1 m |
| Draft | 60 cm |
| Width | 300 cm |
| Dry weight | 500 Kg |
| Payload | 600 Kg (overload up to 1000 kg) |
| Cruise speed | 4 knots |
| Max speed | 8 knots |
| No. of engines | 2 |
| Max engine power | 2x4 kW |
| Standard battery pack | 16 cells lifepo4 3.2V 110Ah . 5.6 kWh x 2 (nominal) 4.8 kWh at standard discharge @ 48V |
| Extended Battery pack | 32 cells lifepo4 3.2V 110Ah . 11.2 kWh x 2 (nominal) 9.6 kWh at standard discharge @ 48V |
| Range (battery operated) | 15 Nm 25 Nm (standard Bp) , 30 nm 50 Nm extended Bp |
| Charging time | Standard Charge: 4h Fast Charge: 1h (fast charger optional) |
| Solar panels area | 6 m^2 , max power 1.1 Kw , charging time 8- 16 hours (standard extended battery pack) |
| Range with solar panel <= speed 3kn | Unlimited, battery recharge |
Dimensions in mm
Thrusting Steering
- Rotation angle: +/-90°
- CAN open interface
- Max rotation speed 15°/sec
- Auto zero
- Encoder resolution 0.1 deg

You may download the historic Abu Dhabi Weather Data provided by meteoblue here